行动和效果公理
我想创建一个公理动作,使代理能够在 如果机器人位于电梯节点,则门, 如果路线连接两个电梯节点
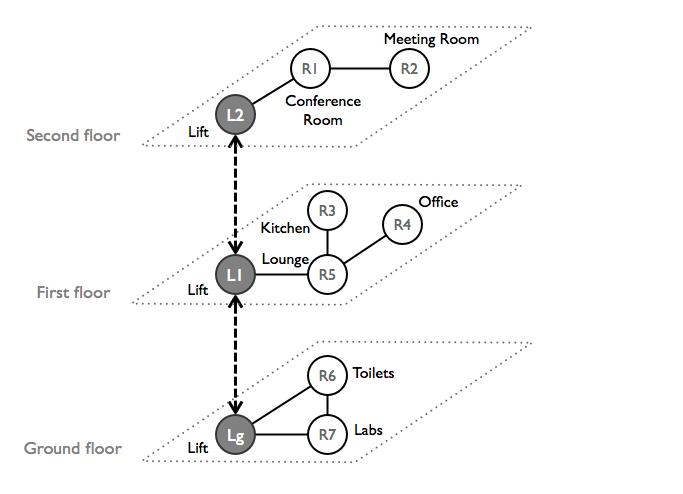
显示结构的地图 建筑。每个节点要么代表一个 房间 (Rn) 或电梯 (Ln)。机器人 可以在房间之间移动(实心 线),或在楼层之间移动(虚线 线)。机器人需要指定 拍摄时的方向(上/下) 电梯。
我正在考虑类似的事情:
isRobot(r)和isEdge(e)和isLift(x)和isLift(y)和isFloor(Floor1)和isFloor(Floor2)和-(x==y) ) 和 -(Floor1==Floor2) 和 at(inside(r,x),Floor1) 和 edgeFrom(e,x,y)ad=>goUp(inside(r,y),Floor2) 或 goDown(inside( r,y),Floor2)
我的谓词是: 移动(x,y)- 边缘从(x,y,z)- 在(x,y) 里面(x,y)- 除尘(x,y)- isClean(x)-
房间(x)- isEdge(x)- isFloor(x)- 向上(x,y)- 向下(x,y) 升力(x) isRobot(x)
我是否正式确定了该操作?如果不是,我该怎么办?
I want to create an axiom-action tha will enable an agent to move up or down between
doors if the robot is in a lift node,
and if a route connects the two lift nodes
A map which shows the structure of the
building. Each node either represent a
room (Rn) or a lift (Ln). The robot
can either move between rooms (solid
lines), or move between oors (dashed
lines). The robots needs to specify
the direction (up/down) when taking
the lift.
I was thinking of something like:
isRobot(r) and isEdge(e) and isLift(x) and isLift(y) and isFloor(Floor1) and isFloor(Floor2) and -(x==y) and -(Floor1==Floor2) and at(inside(r,x),Floor1) and edgeFrom(e,x,y)ad=>goUp(inside(r,y),Floor2) or goDown(inside(r,y),Floor2)
My predicates are:
move(x,y)-
edgeFrom(x,y,z)-
at(x,y)
inside(x,y)-
dusting(x,y)-
isClean(x)-
isRoom(x)-
isEdge(x)-
isFloor(x)-
goUp(x,y)-
goDown(x,y)
isLift(x)
isRobot(x)
Did I formalized the action right?If not what should I do?
如果你对这篇内容有疑问,欢迎到本站社区发帖提问 参与讨论,获取更多帮助,或者扫码二维码加入 Web 技术交流群。

绑定邮箱获取回复消息
由于您还没有绑定你的真实邮箱,如果其他用户或者作者回复了您的评论,将不能在第一时间通知您!





发布评论
评论(1)
您应该查看 PDDL 和 STRIPS 文档;会有帮助的。
http://planning.cis.strath.ac.uk/competition/
他们有样本问题;所以你应该能够一起去。
一切顺利。
You should look at the PDDL and STRIPS documentations; it'll help.
http://planning.cis.strath.ac.uk/competition/
They have sample problems; so you should be able to go along.
All the best.